深圳市通成自动化设备有限公司
QQ: 2413092183
QQ:443231019
电话:0755-33199429
手机:
饶先生 13631587092
黄先生 13692211190
丽丽 18772968620
李先生 18128639712
邮箱:
472233169@qq.com 饶先生
2413092183@qq.com 丽丽
toolcenrobot@gmail.com Lily
外贸部:
Lily Mob/Wechat/WhatsAPP
/Facebook/X : +86 18772968620
Email : 2413092183@qq.com
工厂地址:广东省东莞市虎门镇陈村社区榕中路4号1栋,2栋
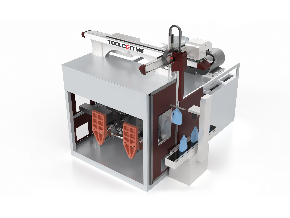
注塑机机械手有哪些分类?
注塑机械手的组成一般由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或电机来驱动机械部件的运转,达到取物的功能。随着机械手应用的逐渐加深,现在放嵌件、剪切产品胶口和简单装配。
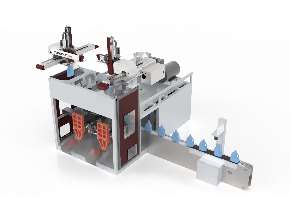
1、基本型注塑机械手,该类型机械手一般包括固定模式程序和按生产工艺需求的教导模式程序。固定模式程序涵盖了注塑生产的几种标准工艺,利用工业控制器来做简单、规则和重复的动作。教导模式程序是特意为生产工艺特殊的注塑机适用,通过把基本动作的有序而安全的编排达到成功取物的目的。
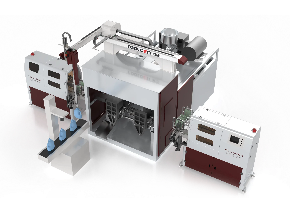
2、智能型注塑机械手,该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,一般采用伺服驱动,能够进行最大限度的仿人执行比较复杂的操作,还可以通过配备先进的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能的注塑机器人。
二、按其他分类方式分类如下:
驱动方式分为气动,变频,伺服。
按机械结构分为旋转式,横行式,侧取式。
按手臂结构分为单截,双截。
按手臂多少分为单臂和双臂。
按X轴结构分为挂臂式和框架式。
按轴的数量分为单轴 双轴 三轴 四轴 五轴等。
按照控制程序的不同分为多套固定程式和可自主编辑程式。
按手臂可移动区分设备大小,一般以100MM递增。